Inserting the installation parameters for the motion reference unit (MRU)
The physical rotation of the motion reference unit (MRU) relative to the transducer is required to allow the ST90 system to adjust for roll and pitch as accurately as possible. This task is only applicable is you are using an external motion reference unit on your ST90 system. Correct values for motion sensor rotation are critical for the sonar performance.
The ST90 system has been set up with its hardware units connected as specified in the Installation Manual.
- The ST90 system is turned on and operates normally.
- The ST90 system is in Normal mode, but TX Power is set to Off to prevent transmissions.
- The vessel is berthed or at sea.
- Neither tools nor instruments are required.
The relevant offset values can normally be taken from the vessel drawings.
The ST90 system is provided with a built-in motion sensor to provide electronic stabilization of the sonar beams. It is placed inside the Motor Control Unit. The motion sensor measures the roll and pitch movements of the vessel.
If you want to use the built-in motion sensor, you do not need to enter any offset values.
If the hull unit has been installed with the Motor Control Unit pointing straight aft, you do not need to enter any rotation values. If the unit faces in any other direction you must compensate for this by typing the relevant value for Rotation Around Z.
For improved operational accuracy, an external motion reference unit (MRU) can be used.
- Offsets
The offset values specify the physical location of the motion reference unit relative to the reference point (origin). The relevant offset values can normally be taken from the vessel drawings.
- Rotation
The values for rotation around the X, Y and Z axis are used to compensate for any misalignments made during the physical installation of the motion reference unit. Such misalignments occur if the sensor is not placed in parallel with the vessel’s horizontal and/or vertical planes. We strongly recommend that you install your motion reference unit so that all rotation angles can be set to 0 (zero).
The required accuracy of the offset and rotation angles depends on the accuracy requirements for the echo data.
Correct values for motion sensor rotation are critical for the sonar performance.
The motion sensor offset values (its physical location relative to the vessels' coordinate system) are not important for sonar operation.
The Kongsberg Seapath® - and other GPS systems - allow you to define the MRU location in the positioning system. If this is done, the MRU offset values in the ST90 system must be set to 0 (zero) to avoid "dual compensation". The rotation angles are normally not recorded by the positioning system. These can either be inserted into the MRU control application, or into the ST90 system. Make sure that you do not insert them both places.
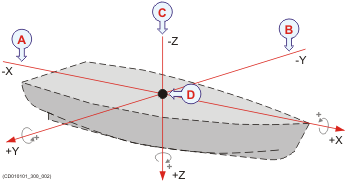
- Rotation around the x-axis: In the positive horizontal direction (forward), a positive rotation is clockwise.
- Rotation around the y-axis: In the positive horizontal direction (starboard), a positive rotation is clockwise.
- Rotation around the z-axis: In the positive vertical direction (down), a positive rotation is clockwise.
- Reference point (Ship Origin)
Procedure
- Open the Setup menu.
- On the Setup menu,
select Installation.

Observe that the Installation dialog box opens. This dialog box contains a number of pages selected from the menu on the left side.
- On the left side of
the Installation dialog box, select the small white triangle next to Installation Parameters.
Observe that a menu opens with access to all the individual pages.
- Select MRU to open the page.
- From the vessel drawings,
extract the relevant offset information, and insert those values.
Do this as accurately as possible.
Note:The Kongsberg Seapath® - and other GPS systems - allow you to define the MRU location in the positioning system. If this is done, the MRU offset values in the ST90 system must be set to 0 (zero) to avoid "dual compensation". The rotation angles are normally not recorded by the positioning system. These can either be inserted into the MRU control application, or into the ST90 system. Make sure that you do not insert them both places.
- From the information provided by the personnel installing
the motion sensor, obtain the relevant rotation information. Insert the values.
Do this as accurately as possible.
- At the bottom of the page, select Apply to save your settings.
- Continue your work in the Installation dialog box, or select OK to close it.