Adjusting the stabilization offsets for the external motion sensor
The ST90 system is provided with a built-in motion sensor to provide electronic stabilization of the sonar beams. It is placed inside the Motor Control Unit. For improved operational accuracy, an external motion reference unit (MRU) can be used. It is very important that the motion sensor is set correctly with stabilization offset values that are adapted to the physical installation angles of the hull unit. To align an external motion sensor to the internal sensor, you may need to adjust the stabilization offset values. This task is only applicable is you are using an external motion reference unit on your ST90 system.
Before you do this task, you must adjust the installation offset of the motion sensor.
The ST90 system has been set up with its hardware units connected as specified in the Installation Manual.
- The external motion sensor is connected to the ST90 system.
- The ST90 system is turned on and operates normally.
- The vessel is berthed.
We recommend that you do this task in calm sea without any vessel movements.
It is very important that the motion sensor is set correctly with stabilization offset values that are adapted to the physical installation angles of the hull unit. Even a small offset error can give you very inccurate readings. In many cases a suitable motion sensor is already installed. This sensor may be mounted anywhere on the vessel. Because of this, the risk of stabilization offset misalignment is present.
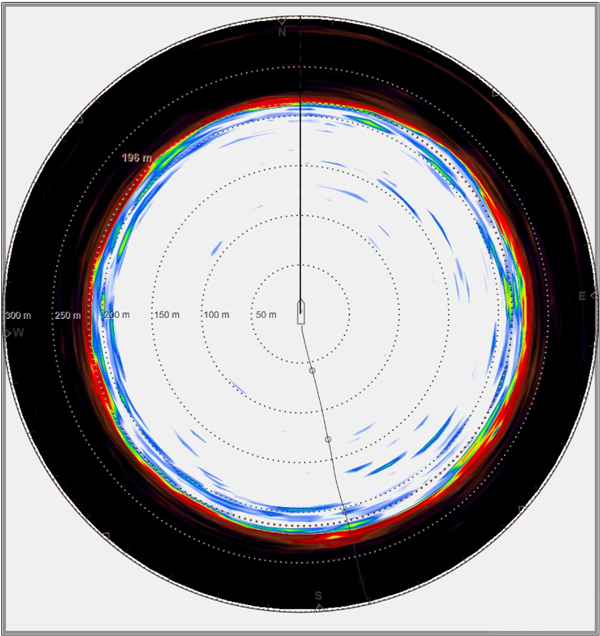
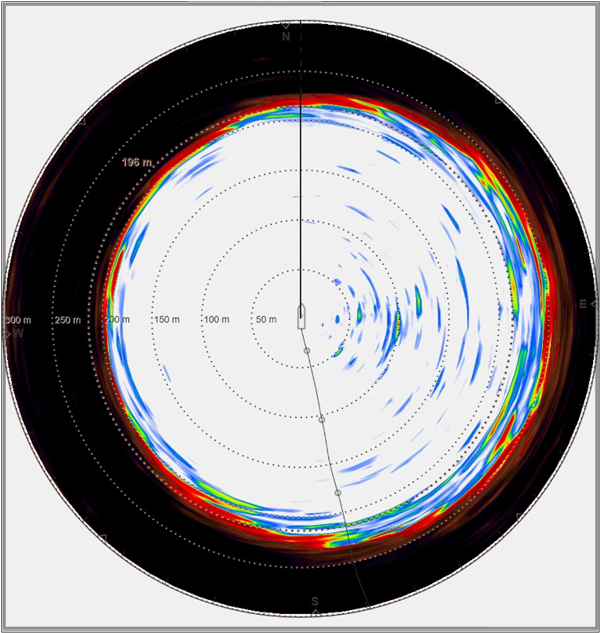
The two screen captures below illustrate how the ST90 system can provide inaccurate data if the stabilization offset is misaligned. In both examples, the tilt is set to approximately 24 degrees, and you are looking at the echoes from a flat bottom at a very short range. The first example is made without any offset errors, and the echoes from the bottom are evenly distributed in the circle. On the second screen capture, a 3 degrees roll offset error causes the echoes to be "distorted". This error will of course be more visible on longer ranges.
Do not confuse stabilization offset with installation offset. The installation offset values describe the physical location and orientation of an item, and how this location is related to the vessel's coordinate system. The stabilization offset values describe any misalignments related to the measurements a sensor make.
Procedure
- Select a very short range.
- Disable the input from the external motion sensor.
- On the Setup menu, select Installation.
- On the left side of the Installation dialog box, select Motion Reference Unit.
- Set Port to LAN to use the internal motion sensor.
- Set Protocol to EM3000 to match the data format provided by the internal motion sensor.
- Select Apply and then OK to save all the parameters and close the Installation dialog box.
- Open the Display menu.
- Select Display Options.
- Select General to open the page.
- In the Top Bar list, enable Roll and Pitch.
- On the top bar, read the roll and pitch values.
- Write down the values.
- Select OK to save the selected settings and close the dialog box.
- Enable the input from the external motion sensor.
- On the Setup menu, select Installation.
- On the left side of the Installation dialog box, select Motion Reference Unit.
- Select the serial port you want to use.
- Select which protocol (datagram sentence) you want to use.
- Select the baud rate.
- Select Apply and then OK to save all the parameters and close the Installation dialog box.
- Compare the information from the external motion sensor with the information from the internal sensor.
- If necessary: Adjust the stabilization offsets.
- Open the Setup menu.
- Open the Stabilization function.
- Adjust the Roll Offset and Pitch
Offset settings.
Select [—] on the left side to decrease the value, or select [+] on the right side to increase.