Adjusting the built-in motion sensor offset
The information from a motion reference unit (MRU) (normally heave, roll and pitch information) is imported into the ST90 system to increase the accuracy of the echo data. The ST90 system is provided with a built-in motion sensor to provide electronic stabilization of the sonar beams. It is placed inside the Motor Control Unit.
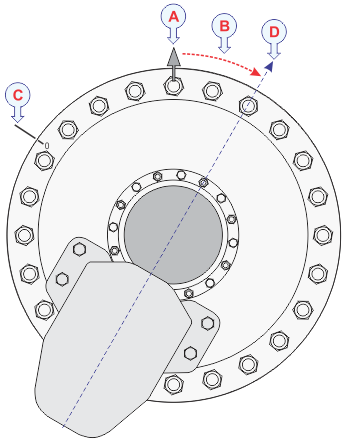
Illustration:
- Bow
- This is the alignment angle: (±180°)
- 0° transducer mark
- 0° motion sensor reference
Neither tools nor instruments are required.
- The ST90 system is turned on.
- The ST90 system does not transmit ("ping").
- The transducer is retracted to its upper position.
- The vessel is berthed or at sea.
You must never set the ST90 system to ping unless the transducer is submerged in water. The transducer can be damaged if it transmits in the open air.
As a general recommendation, the hull unit shall be oriented with the hoisting motor pointing aft. If this orientation makes it difficult to access electrical connections, the hull unit may be rotated during its installation to the most suitable direction. The 0° reference for the built-in sensor is always related to the gantry. If the hoist/lower motor does not point aft (on or parallel to the vessel’s centre line) the built-in motion sensor offset must be defined. Independent of the hull unit orientation, the offset of the built-in motion sensor is always defined as:
The angle measured from the bow to the motion sensor’s 0° reference.
On the MRU page, define the offset as rotation around Z.
- If the 0° reference mark for the built-in motion sensor points to the starboard (right) side of the vessel’s centre line (as shown in the illustration), insert the offset as a number between 0 and +180 degrees.
- If the 0° reference mark points to the port (left) side of the vessel’s centre line, insert the offset as a number between 0 and –180 degrees.
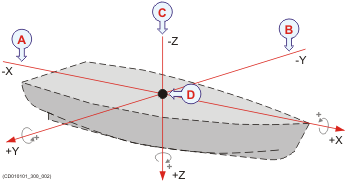
Illustration:
- Rotation around the x-axis: In the positive horizontal direction (forward), a positive rotation is clockwise.
- Rotation around the y-axis: In the positive horizontal direction (starboard), a positive rotation is clockwise.
- Rotation around the z-axis: In the positive vertical direction (down), a positive rotation is clockwise.
- Reference point (Ship Origin)
Procedure
- Estimate the alignment
angle from the bow (vessel’s centre line) to the 0° reference mark
for the built-in motion sensor.
Do this as accurately as possible.
- On the Setup menu,
select Installation.

Observe that the Installation dialog box opens. This dialog box contains a number of pages selected from the menu on the left side.
- On the left side of
the Installation dialog box, select the small white triangle next to Installation Parameters.
Observe that a menu opens with access to all the individual pages.
- Select MRU to open the page.
- Insert the alignment offset angle as
a rotation around Z.
- If the 0° reference mark for the built-in motion sensor points to the starboard (right) side of the vessel’s centre line (as shown in the illustration), insert the offset as a number between 0 and +180 degrees.
- If the 0° reference mark points to the port (left) side of the vessel’s centre line, insert the offset as a number between 0 and –180 degrees.
- At the bottom of the page, select Apply to save your settings.
- Continue your work in the Installation dialog box, or select OK to close it.