Motion Reference Unit page
The motion reference unit (MRU) measures the roll and pitch movements of the vessel. Some sensor models also measure heave. The information provided by the motion sensor is used by the ST90 system to stabilize the beams.
How to open
This page is located in the Installation dialog box. To open the page, select Installation on the Setup menu.

Prerequisites
The Installation dialog box is not available when your ST90 system is set to Replay mode.
Description
The ST90 system is provided with a built-in motion sensor to provide electronic stabilization of the sonar beams. It is placed inside the Motor Control Unit. For improved operational accuracy, an external motion reference unit (MRU) can be used.
- External: Use the Motion Reference Unit page to define the data format and the communication port used to import motion information from an external sensor.
- : Use the internal sensor.
The external sensor must be connected using a serial communication line. If you don’t have any available COM ports you must first release one on the I/O Setup page. Make sure that you do not put the same COM port to other use on the I/O Setup page.
If the sensor is malfunctioning the input can be disabled.
- Select None to disconnect the ST90 system from both external and internal motion sensors.
- The Stabilization function allows you to enable or disable the input from the motion sensor. This function is opened from the Setup menu.
Details
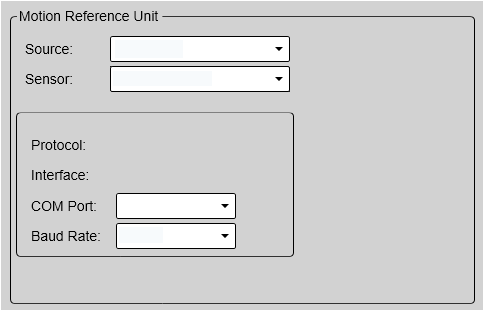
- Source
Select Internal to use the built-in motion sensor. Select External to use a third-party motion sensor.
- Sensor
- External: Select the datagram you want to use
- : Select the sensor you want to use.
Select None to disconnect the ST90 system from both external and internal motion sensors.
- Protocol
This text reflects the chosen datagram format. The term datagram has been defined as follows:
A self-contained, independent entity of data carrying sufficient information to be routed from the source to the destination computer without reliance on earlier exchanges between this source and destination computer and the transporting network.
https://tools.ietf.org/html/rfc1594, April 2016
- Interface
This text reflects the interface format you are using.
- COM Port
This setting is only available if you use a serial line to interface your sensor. Select COMx to connect to the external motion sensor. "COMx" is the serial port to which the motion sensor is connected.
- Baud Rate
This setting is only available if you use a serial line to interface your sensor. Use this setting to specify the baud rate ("speed") for the serial communication.
- LAN Port
This setting is only available if you use the local area network (LAN) to interface your sensor. The text identifies the local area network (LAN) port in use on the remote device. The information is provided for reference purposes. You can not change this information.
- IP Address
This setting is only available if you use the local area network (LAN) to interface your sensor. The text identifies the IP Address in use on the remote device. The information is provided for reference purposes. You can not change this information.
- Status
The current status of the sensor communication is shown. "Not connected" means that the input from the sensor is missing. A message like this (example) verifies that the ST90 system is connected to the built-in motion sensor:
Connected to 192.168.1.30 ST90 Beamformer
Related functionality
- Stabilization
The Stabilization function allows you to enable or disable the input from the motion sensor. If you disable the input from the sensor, the beams will not be compensated for pitch and roll movements. This function is opened from the Setup menu.
- Hull Unit
Use the Hull Unit page to read the software and firmware versions from the Hull Unit Control board. This page is located in the Diagnostics dialog box.